
Day 33 - Introduction to Lagrangian Dynamics#
Announcements#
Feedback on Proposals are out; working on updates
Any Project Questions? Email me!
We can set up a meeting if needed.
Scarlett is grading HW 5 and 6
Friday: No Class (DC out of town)
Monday: Finish Euler-Lagrange Equation; Start Lagrangian Mechanics
Wednesday: Midterm 2 Help Session
Homework 8 is posted
Rubric for Final Project is posted
Seminars This Week#
WEDNESDAY, April 9, 2025#
Astronomy Seminar, 1:30 pm, 1400 BPS, Bertram Bitsch, University College Cork
Title: Planetary DynamicsFRIB Nuclear Science Seminar, 3:30pm., FRIB 1300 Auditorium, Dr. Suzanne Lapi of University of Alabama at Birmingham, Title: Development of new
Seminars This Week#
THURSDAY, April 10, 2025#
Colloquium, 3:30 pm, 1415 BPS, Grant Tremblay, Harvard Smithsonian Astrophysical Observatory, Title: Our fading age of discovery: Why it’s happening, and why we can’t give up
FRIDAY, April 11, 2025#
IReNA Online Seminar, 2:00 pm, FRIB 2025 Nuclear Conference Room, Marco La Cognata, INFN LNS, Italy, Title: Nuclear reactions for Astrophysics and the opportunity of indirect methods
Final Project Rubric#
\(P\), Physics Content (40%):
Clear explanation of the physical problem being addressed.
Appropriate use of computational methods to analyze the problem.
Correctness and accuracy of the results and conclusions drawn from the analysis.
\(C\), Computational Implementation (30%):
Code is well-organized, readable, and follows best practices (e.g., comments, variable names).
The computational approach is appropriate for the problem and effectively implemented.
Code runs without errors and produces the expected output.
Final Project Rubric#
\(W\), Writing and Presentation (20%):
The essay is well-structured with a logical flow of ideas.
Visualizations (if any) are clear, relevant, and enhance the understanding of the content.
Proper formatting and adherence to any specified guidelines (e.g., length, citation style).
\(R\), Reflection and Discussion (10%):
Thoughtful reflection on the computational approach and its limitations.
Discussion of the implications of the results and how they relate to the original problem.
Consideration of potential future work or extensions to the analysis.
Final Project Rubric#
Each section of the rubric will be scored on a 4.0 scale.
Criteria |
Excellent (4.0) |
Great (3.5) |
Good (3.0) |
Fair (2.5) |
Poor (2.0) |
Missing (0) |
|---|
Your grade will be computed based on the weighted average of the above criteria. Your final score (on a 100 scale) will be calculated as follows:
Details? Under ‘Resources’ https://dannycaballero.info/phy321msu/resources/computational-essay-rubric.html
Newton’s Laws#
We use Newton’s laws of motion to describe the dynamics of a system:
First Law: An object at rest remains at rest, and an object in motion continues in motion with the same speed and in the same direction unless acted upon by a net external force.
Second Law: The acceleration of an object is directly proportional to the net force acting on it and inversely proportional to its mass. Mathematically, this is expressed as: $\( \vec{F} = m \vec{a} \)$
Third Law: For every action, there is an equal and opposite reaction. This means that if object A exerts a force on object B, then object B exerts a force of equal magnitude and opposite direction on object A.
Newton’s Laws Expectations#
We can describe every interaction on a body using forces
We can sum up all the forces vectorially in particular coordinate systems (Cartesian, polar, etc.)
We can derive equations of motion for a system by applying Newton’s second law
Sometimes, these expectations can be limiting, especially when dealing with complex systems or when forces are not easily identifiable.
Newton’s Laws in Plane Polar Coordinates#
In plane polar coordinates (\(r,\phi\)), we can express Newton’s second law as follows:
where:
\(\ddot{r}\) is the radial acceleration,
\(\dot{\phi}\) is the angular velocity,
\(\ddot{\phi}\) is the angular acceleration,
\(\hat{r}\) and \(\hat{\phi}\) are the unit vectors in the radial and angular directions, respectively.
How? And what new insights can we gain from this?
Clicker Question 33-1#
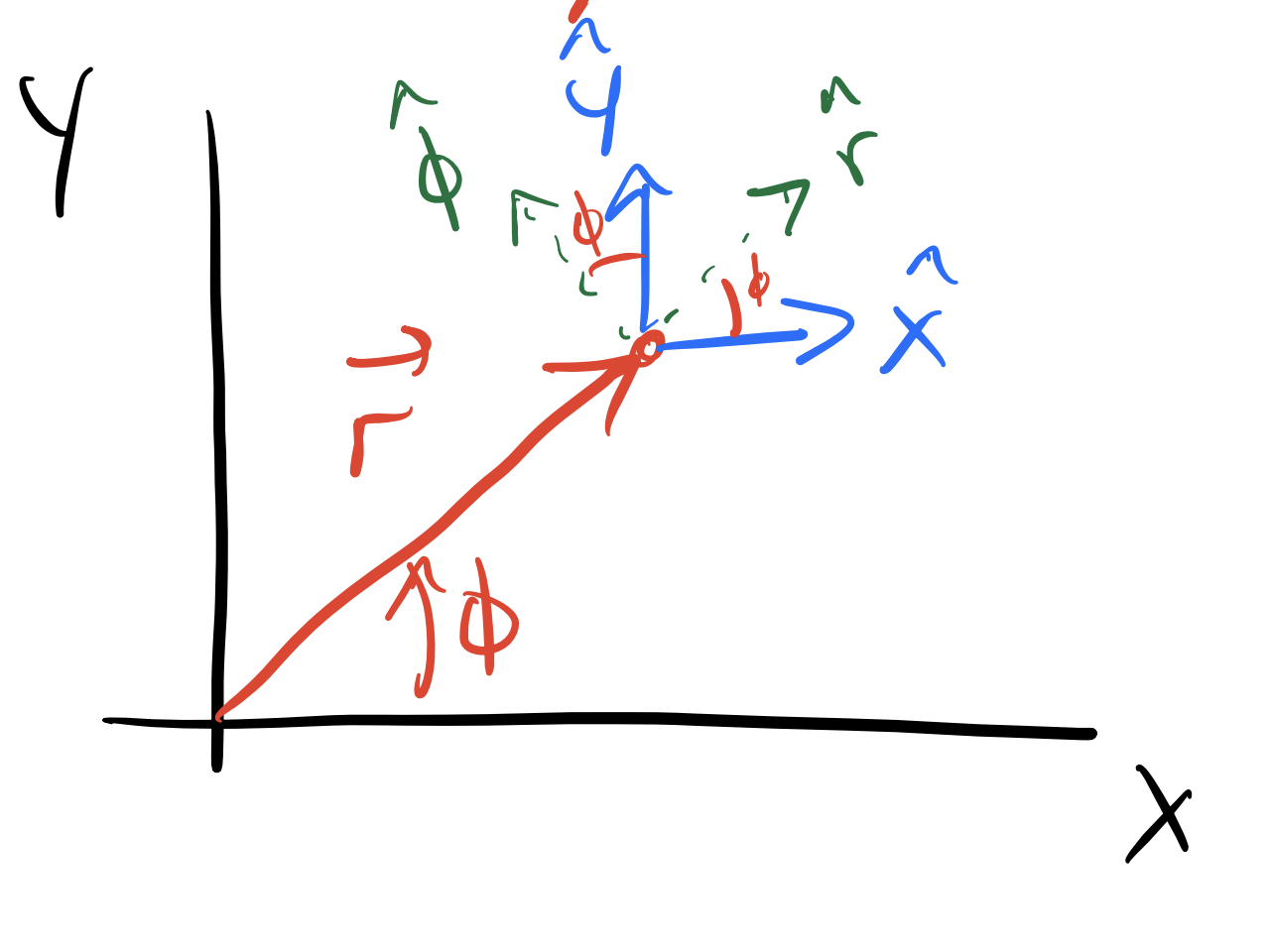
The appropriate definition of the \(\hat{r}\) vector using Cartesian coordinates (\(x,y\)) is:
\(\hat{r} = \left( \cos(\phi), \sin(\phi) \right)\)
\(\hat{r} = \left( \sin(\phi), \cos(\phi) \right)\)
\(\hat{r} = \left(-\sin(\phi), \cos(\phi) \right)\)
\(\hat{r} = \left( \cos(\phi), -\sin(\phi) \right)\)
None of the above.
Clicker Question 33-2#
The appropriate definition of the \(\hat{\phi}\) vector using Cartesian coordinates (\(x,y\)) is:
\(\hat{\phi} = \left( \cos(\phi), \sin(\phi) \right)\)
\(\hat{\phi} = \left( \sin(\phi), \cos(\phi) \right)\)
\(\hat{\phi} = \left(-\sin(\phi), \cos(\phi) \right)\)
\(\hat{\phi} = \left( \cos(\phi), -\sin(\phi) \right)\)
None of the above.
Clicker Question 33-3#
We need to take the derivative of \(\hat{r}\) with respect to time. Why should we do this in Cartesian coordinates?
The Cartesian coordinates are easier to work with for derivatives.
The derivative of \(\hat{r}\) in Cartesian coordinates are zero.
The unit vector \(\hat{r}\) is location dependent.
The Cartesian unit vectors do not change with time.
Something else?
Summary of Results#
With \(\vec{r} = r \hat{r}\),
This allows us to express Newton’s second law in polar coordinates as:
Or
Euler-Lagrange Equation#
We found that certain kinds of optimization problems involving functionals could be solved using the Euler-Lagrange equation. This equation provides a powerful method to derive the equations of motion for a system based on an action principle.
The Euler-Lagrange equation is given by:
where \(f(y, y', x)\) is a functional that depends on the dependent variable \(y\), its derivative \(y' = \frac{dy}{dx}\), and the independent variable \(x\).
The Action Integral#
The action integral is central to Lagrangian dynamics. The action \(S\) is defined as the integral of a functional \(L(q,\dot{q},t)\) over time:
where:
\(q\) represents the generalized coordinates of the system,
\(\dot{q}\) represents the generalized velocities (time derivatives of \(q\)),
\(t\) represents time.
Hamilton’s Principle: The path the system takes minimizes (or extremizes) the action \(S\).
The Lagrangian#
The Lagrangian \(\mathcal{L}\) is a function that summarizes the dynamics of the system. It is typically defined as:
where:
\(T\) is the kinetic energy of the system (depends on gen. vel., \(\dot{q}\)),
\(V\) is the potential energy of the system (depends on gen. pos., \(q\)).
The equation of motion is recovered by applying the Euler-Lagrange equation to the Lagrangian (minimizing the action integral).
Clicker Question 33-4#
For a 1D SHO, the kinetic and potential energy are given by:
What are the derivatives of the Lagrangian \(\mathcal{L} = T - V\) with respect to \(x\) and \(\dot{x}\)?
\(\frac{\partial \mathcal{L}}{\partial x} = kx\) and \(\frac{\partial \mathcal{L}}{\partial \dot{x}} = m\dot{x}\)
\(\frac{\partial \mathcal{L}}{\partial x} = -kx\) and \(\frac{\partial \mathcal{L}}{\partial \dot{x}} = m\dot{x}\)
\(\frac{\partial \mathcal{L}}{\partial x} = kx\) and \(\frac{\partial \mathcal{L}}{\partial \dot{x}} = -m\dot{x}\)
\(\frac{\partial \mathcal{L}}{\partial x} = -kx\) and \(\frac{\partial \mathcal{L}}{\partial \dot{x}} = -m\dot{x}\)
None of the above.
Clicker Question 33-5#
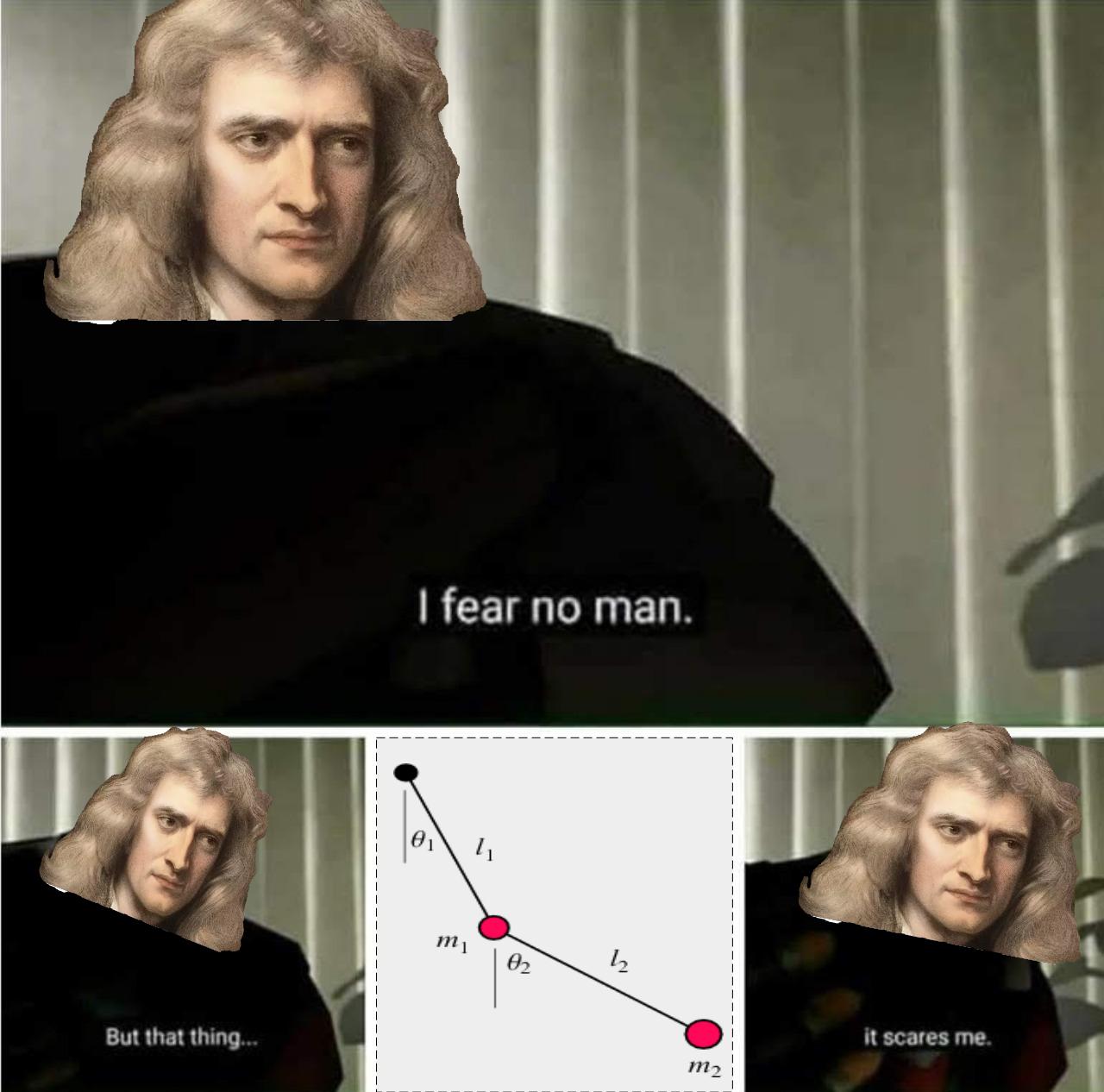
For the plane pendulum, with \(\mathcal{L}(x, \dot{x}, y, \dot{y}, t) = \frac{1}{2} m \left( \dot{x}^2 + \dot{y}^2 \right) - mgy\)
We found:
Does that seem right?
Yes, it’s fine.
Maybe, but I’m not sure I can tell you why.
No, I know this is wrong, but I’m not sure why.
No, this is definitely wrong and I can prove it!
Clicker Question 33-6#
For the plane pendulum, we changed the Lagrangian from Cartesian coordinates to plane polar coordinates. In Cartesian, we found the Lagrangian depended on \(y,\dot{x},\dot{y}\). In polar, it only depended on \(\phi\) and \(\dot{\phi}\).
What does that tell you about the dimensions of the system? The system is:
in 3D space, so it’s 3D.
described by two spatial dimensions (\(x,y\)), so it’s 2D.
described by one spatial dimension (\(\phi\)), so it’s 1D.